For quite a few years now, I have been an avid Train Simulator player, operating virtual trains from the United States, the UK, and beyond. I’ve played Dovetail Games' Train Simulator 2015 to 2022 and now “Train Simulator Classic”, FIFA-style annual upgrades that have incrementally improved the core game - and I’ve spent a decent amount of money on the much-memed Train Simulator DLC. The game is pretty immersive, but since part of my life also includes running real-life rail vehicles, I naturally want to make it feel even more real. The next logical step would be to build a physical controller for Train Simulator.
This has been done before: the best-known option is the RailDriver controller, a dashboard-esque plastic slab with most of the controls you’d need for a (virtual) train: independent and automatic brake levers, a combined throttle/dynamic brake lever, reverser, high/low horn lever, a digital speedometer, and a host of buttons that can be programmed and hand-labeled to be other train controls. While I have been intrigued by the RailDriver, the price has intimidated me ($200), and I also have mixed feelings about the plasticy, unrealistic look.
More recently, Alan Thomson Simulation has released a set of pricey but sturdier, more realistic-looking controller components for Train Simulation (https://tscontrollers.com/), such as a door controller unit, a power/brake handle, and an AWS plunger. Each of these looks like a fine product, but each is also expensive, and most are sold out. What I really want is something that feels even more like the dashboard of a real train, and that’s the challenge I’m setting for myself. In particular, I want to model my Train Simulator controller after the cab of a Class 80x (800, 801, 802, 805...) UK train.

Since November 2022, I have been working on various aspects of this project, including:
I have been dragging my feet on actually posting about this project on Cemetech (save for this oblique topic about stepper motors), but now that I have finally gotten it started, I intend to post much more frequently about the project, including plenty of visuals that are missing from this introduction. Don't hesitate to post any comments, questions, and suggestions - and if you happen to be a Train Simulator enthusiast, a current or past driver, or especially have good (legal) sources for scrapped or OEM equipment (especially master controllers - anyone have a connection at Faverly?), please let me know!
This has been done before: the best-known option is the RailDriver controller, a dashboard-esque plastic slab with most of the controls you’d need for a (virtual) train: independent and automatic brake levers, a combined throttle/dynamic brake lever, reverser, high/low horn lever, a digital speedometer, and a host of buttons that can be programmed and hand-labeled to be other train controls. While I have been intrigued by the RailDriver, the price has intimidated me ($200), and I also have mixed feelings about the plasticy, unrealistic look.
More recently, Alan Thomson Simulation has released a set of pricey but sturdier, more realistic-looking controller components for Train Simulation (https://tscontrollers.com/), such as a door controller unit, a power/brake handle, and an AWS plunger. Each of these looks like a fine product, but each is also expensive, and most are sold out. What I really want is something that feels even more like the dashboard of a real train, and that’s the challenge I’m setting for myself. In particular, I want to model my Train Simulator controller after the cab of a Class 80x (800, 801, 802, 805...) UK train.
Since November 2022, I have been working on various aspects of this project, including:
- Starting from taking apart standard instruments like an aftermarket automobile tachometer to understand how modern electromechanical instruments work, documented in "Train Simulator Controller: Stepper Speedometer Begins".
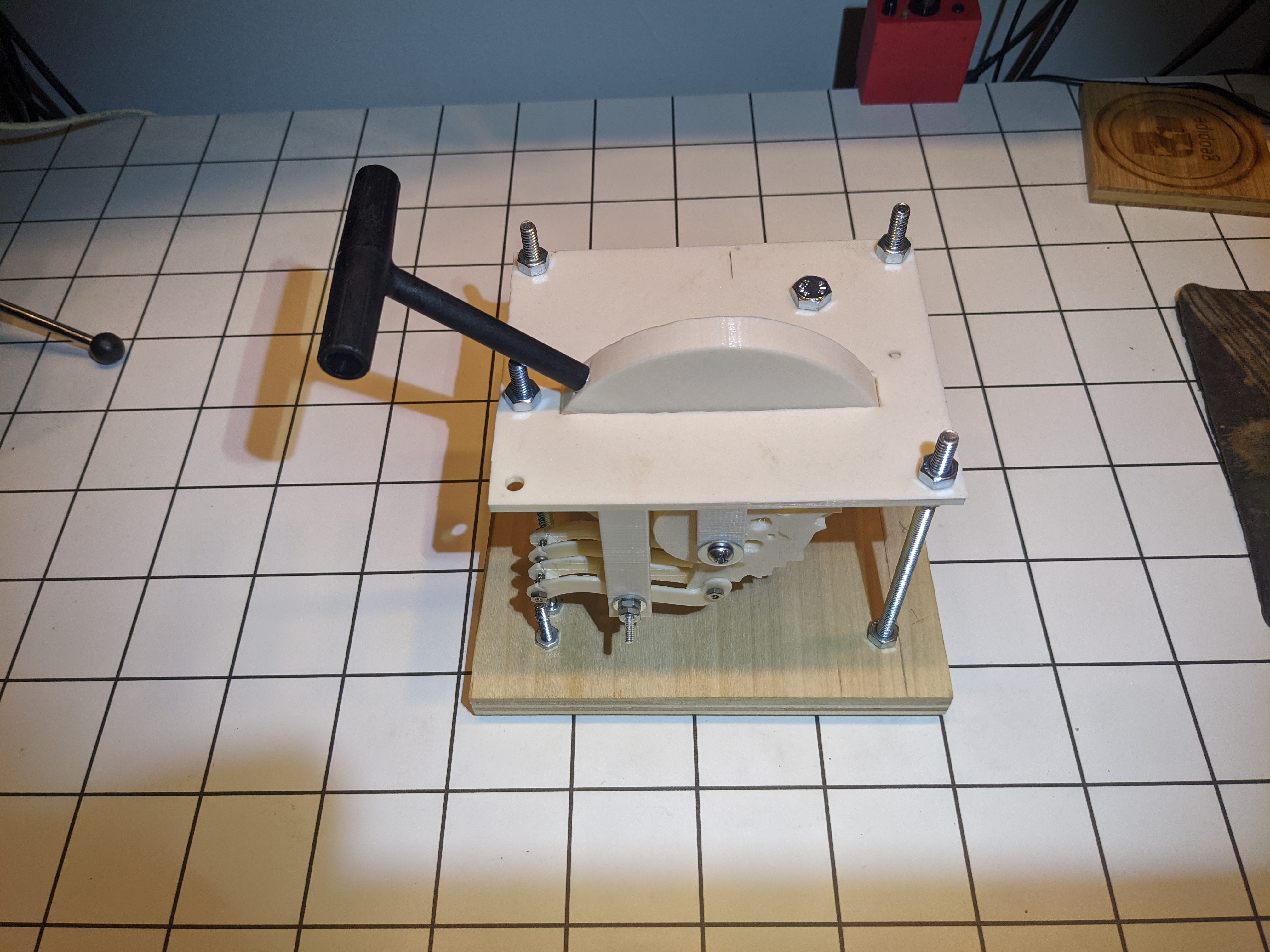
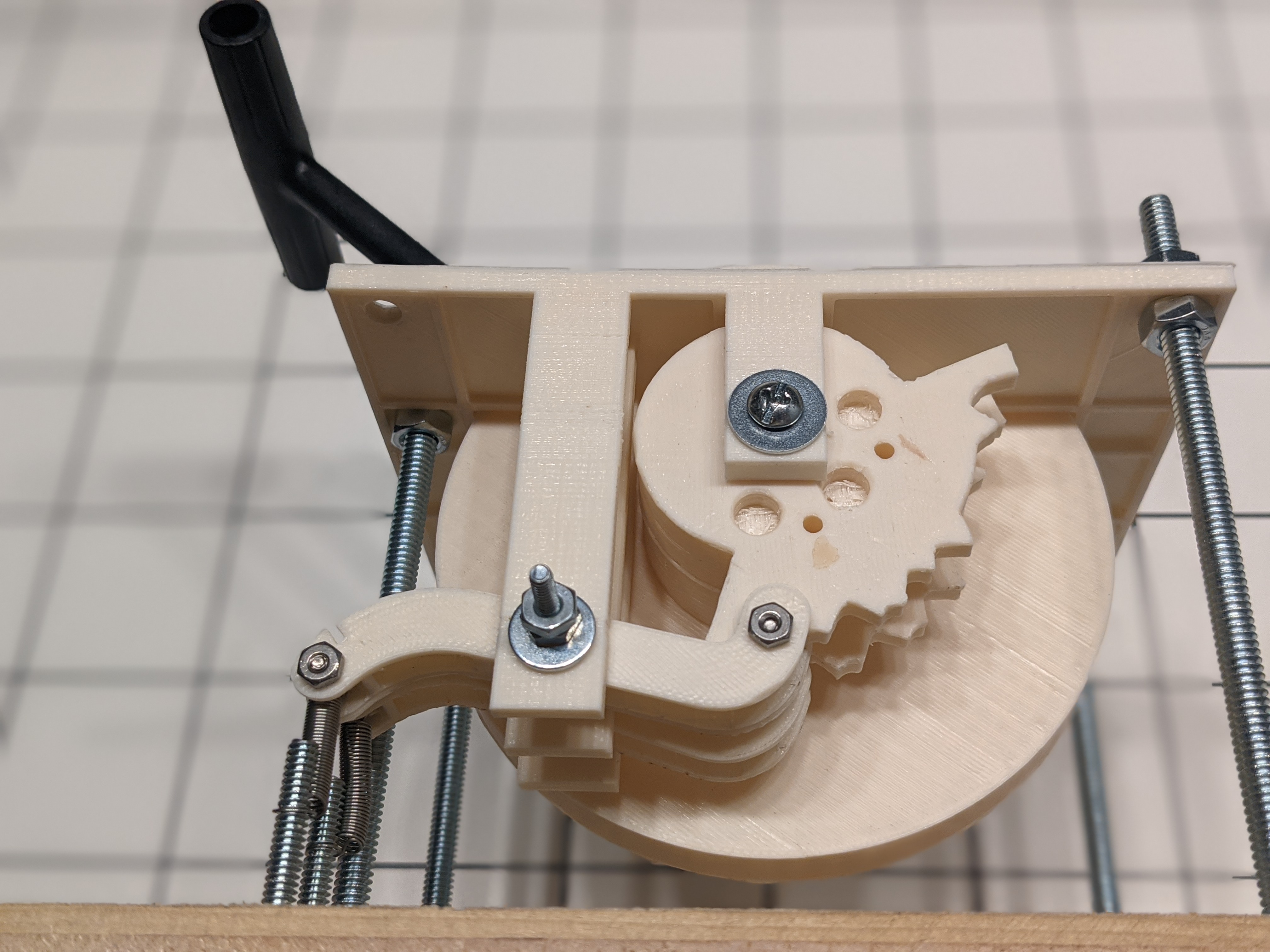
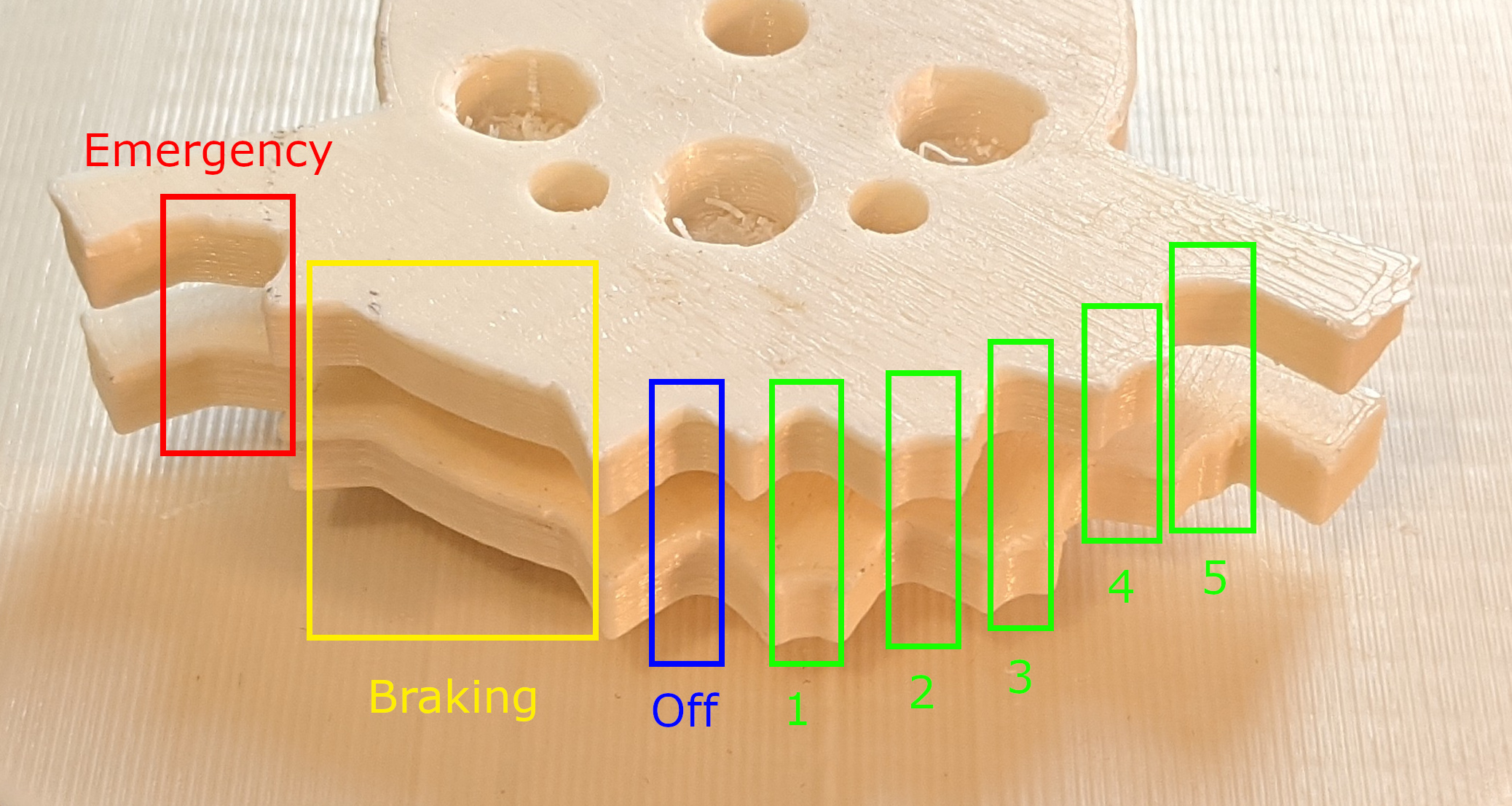
- Beginning to design a master controller (the unit and handle(s) that control the throttle or combined throttle and brake), drawing on 108-year-old documentation and my 3D printer. My first steps here are documented in "Train Simulator Controller: Master Controllers and Starwheels".
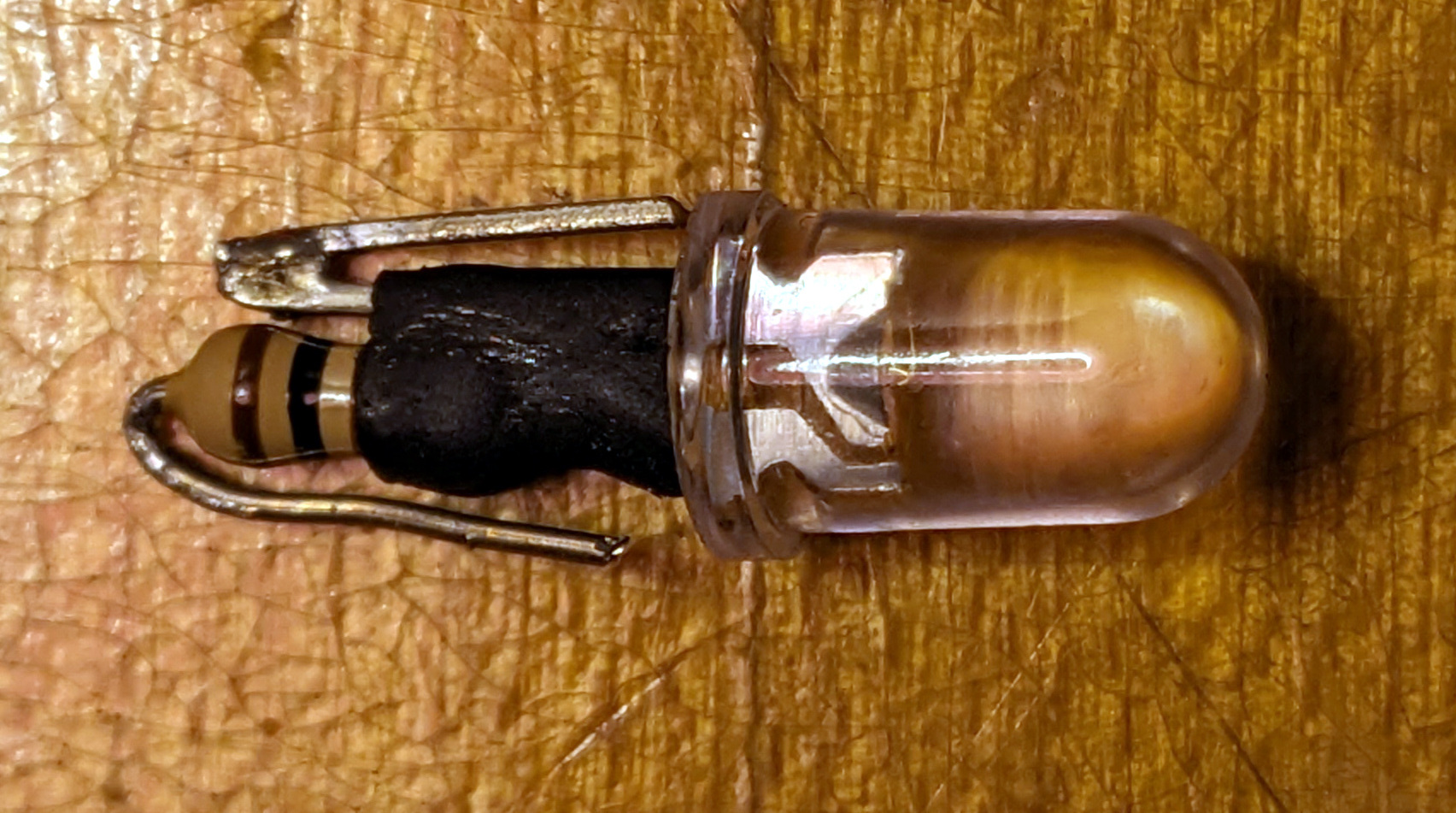
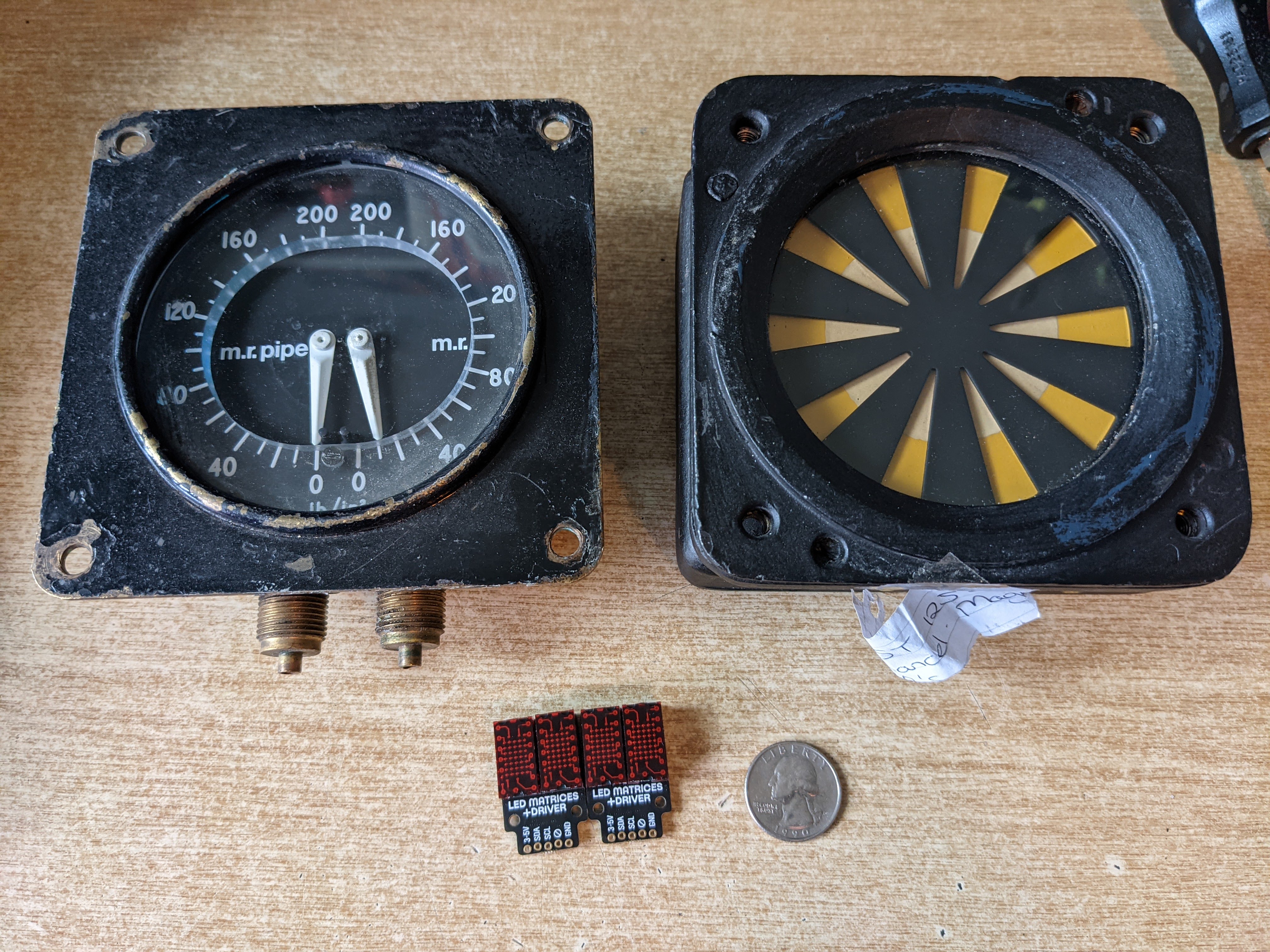
- Exploring making, acquiring, and eventually successfully acquiring the excitingly named "AWS sunflower" used in most UK trains, getting it to work, and then getting it to work with Train Simulator. The basics of the AWS sunflower is documented in "Train Simulator Controller: Inside an AWS Sunflower"
- Further refinements, redesigns, and more 3D printing to ultimately build my first master controller prototype in May - June 2023 (blog post not yet written).
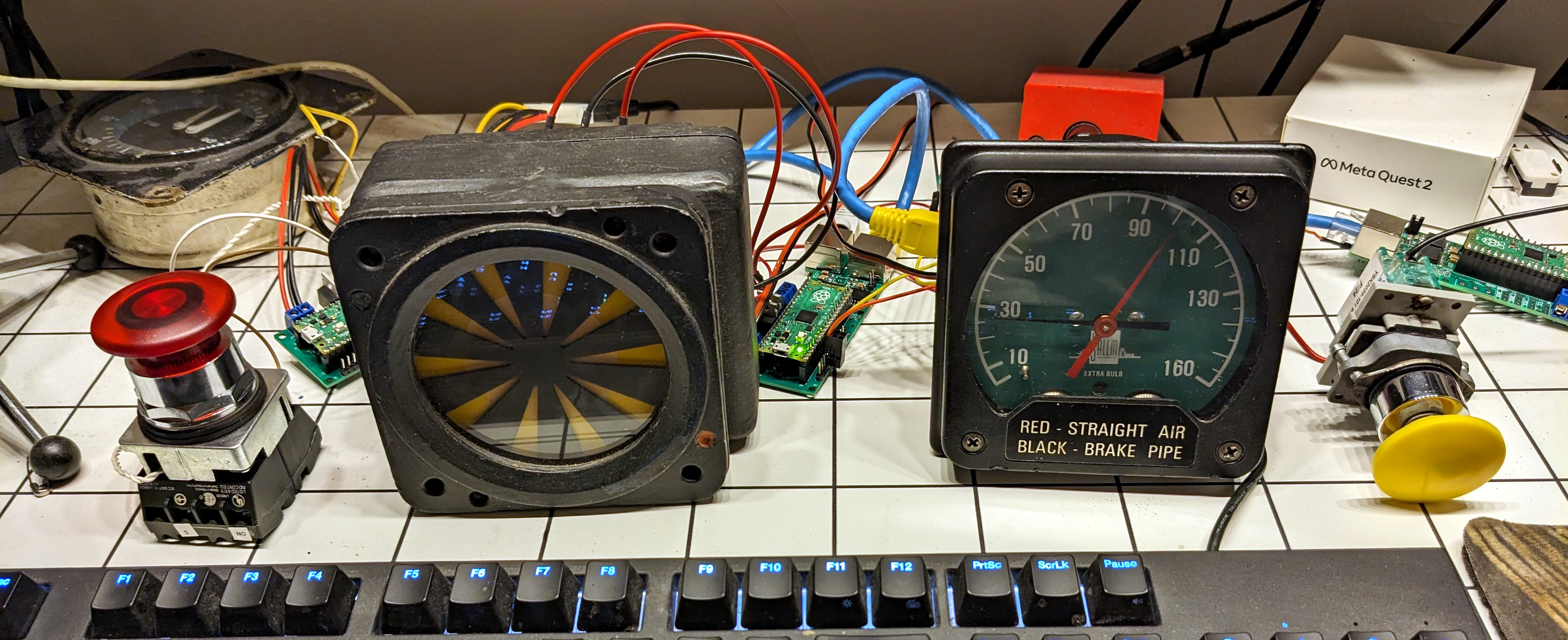
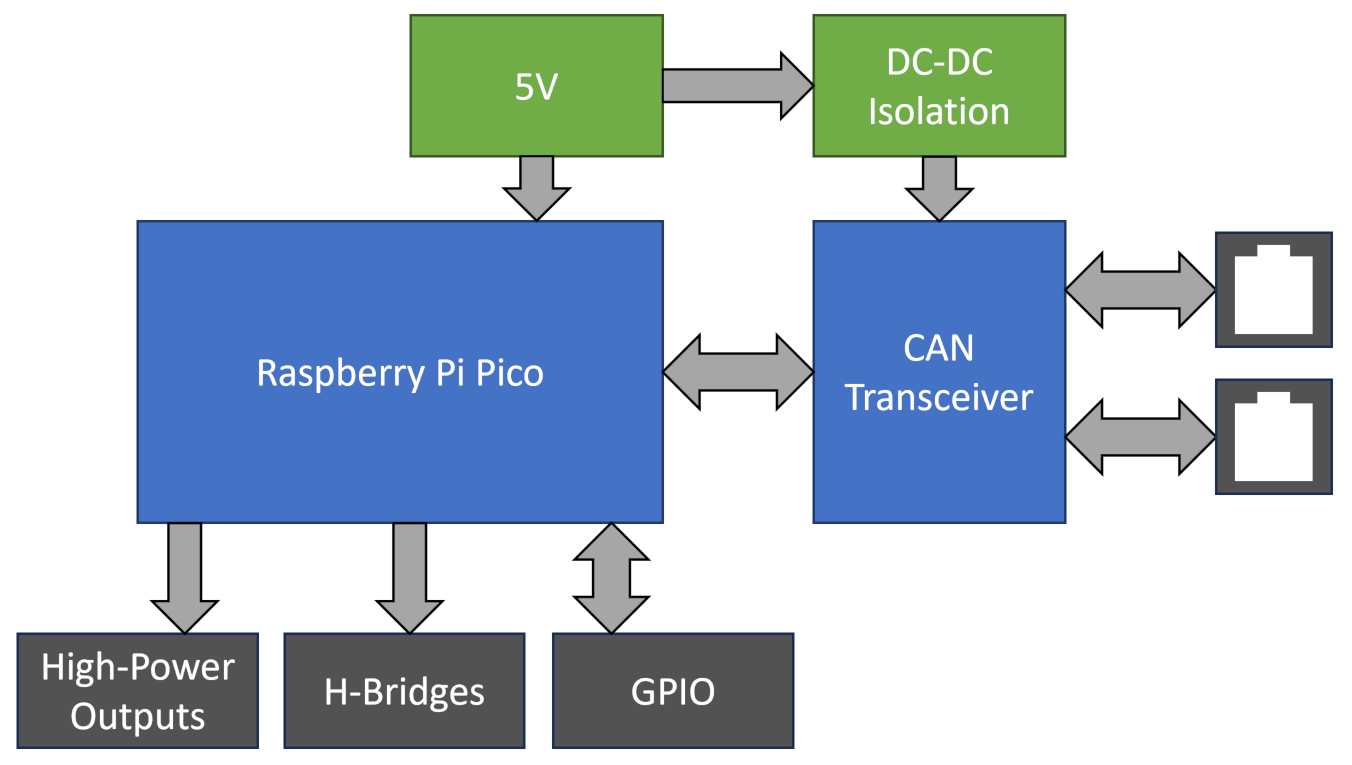
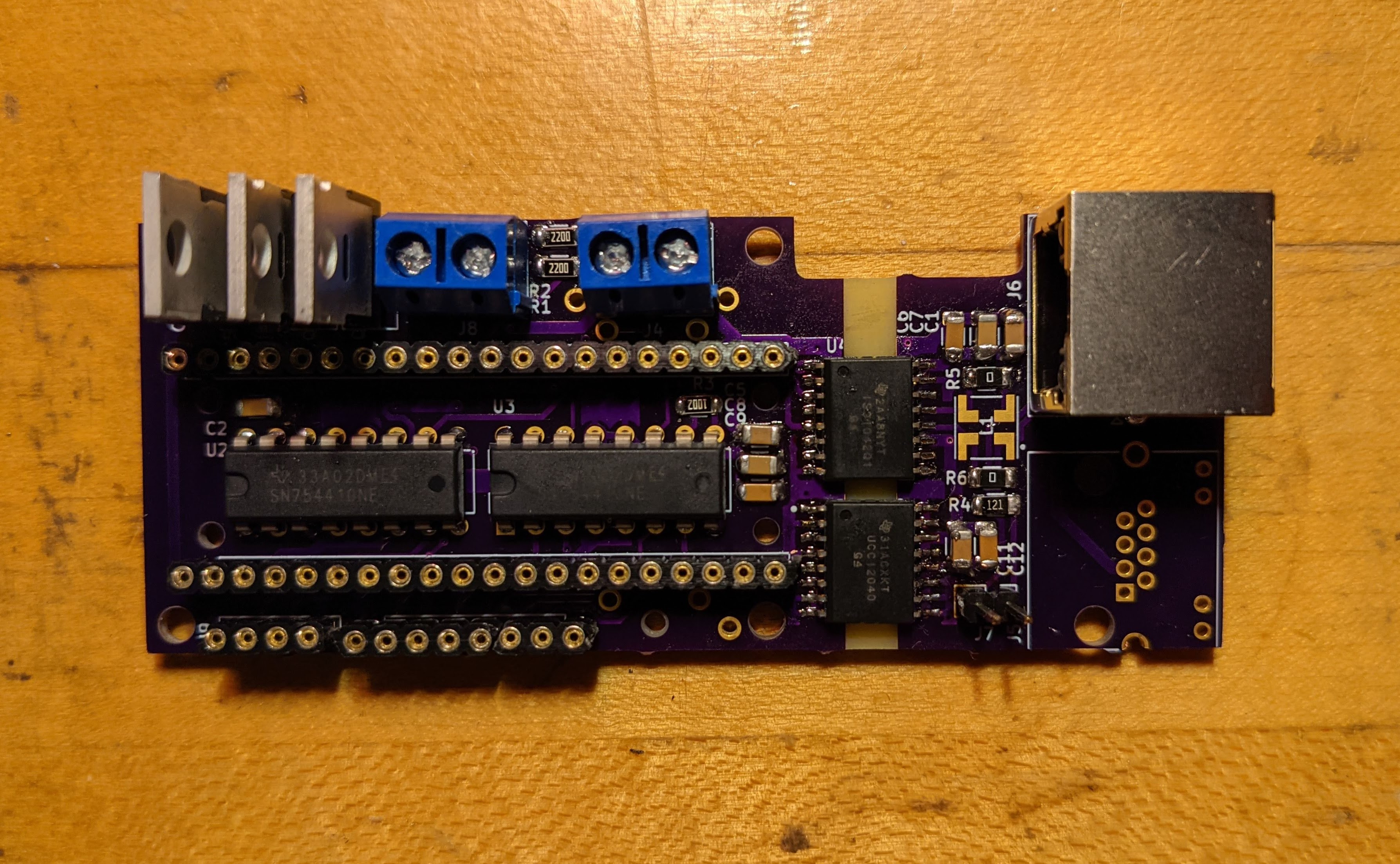
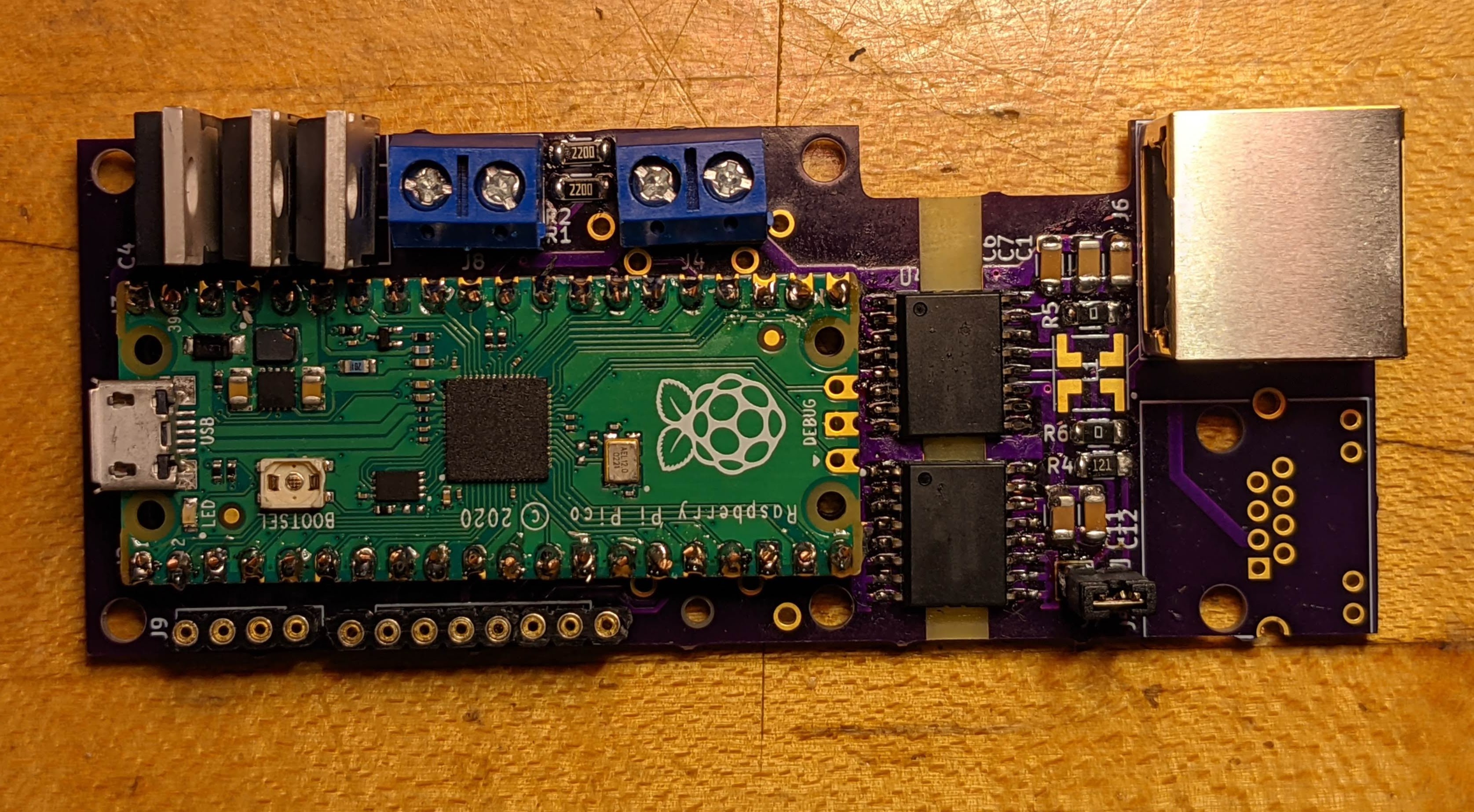
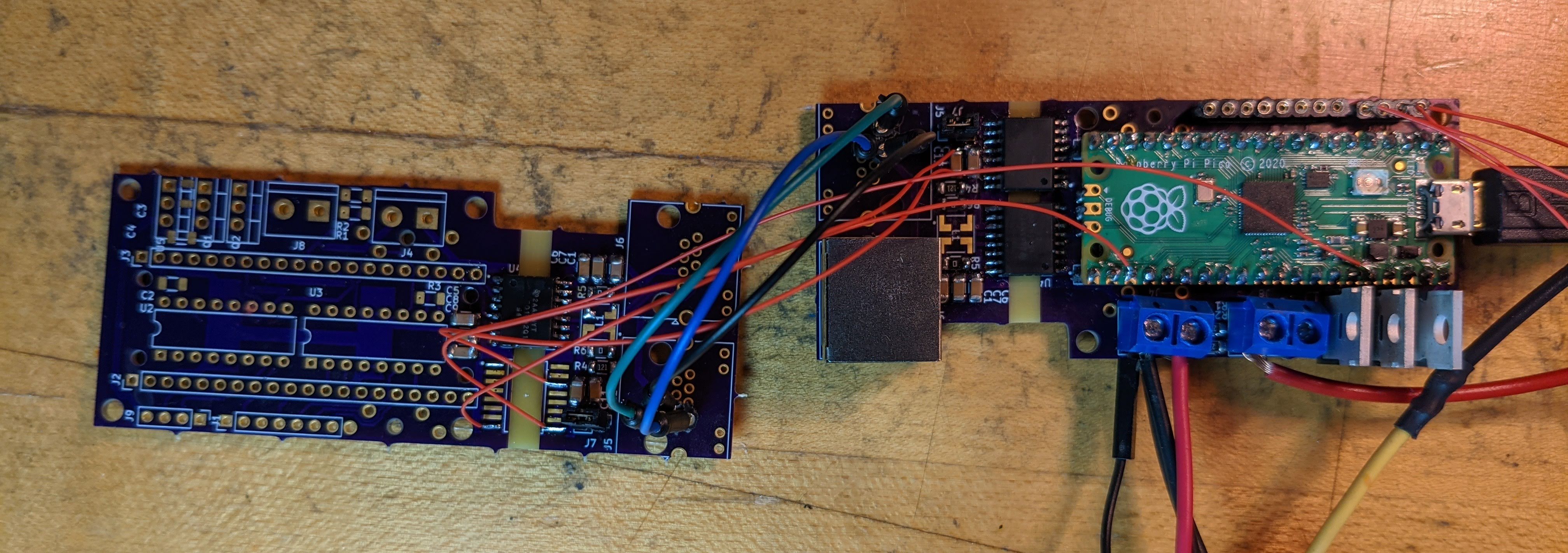
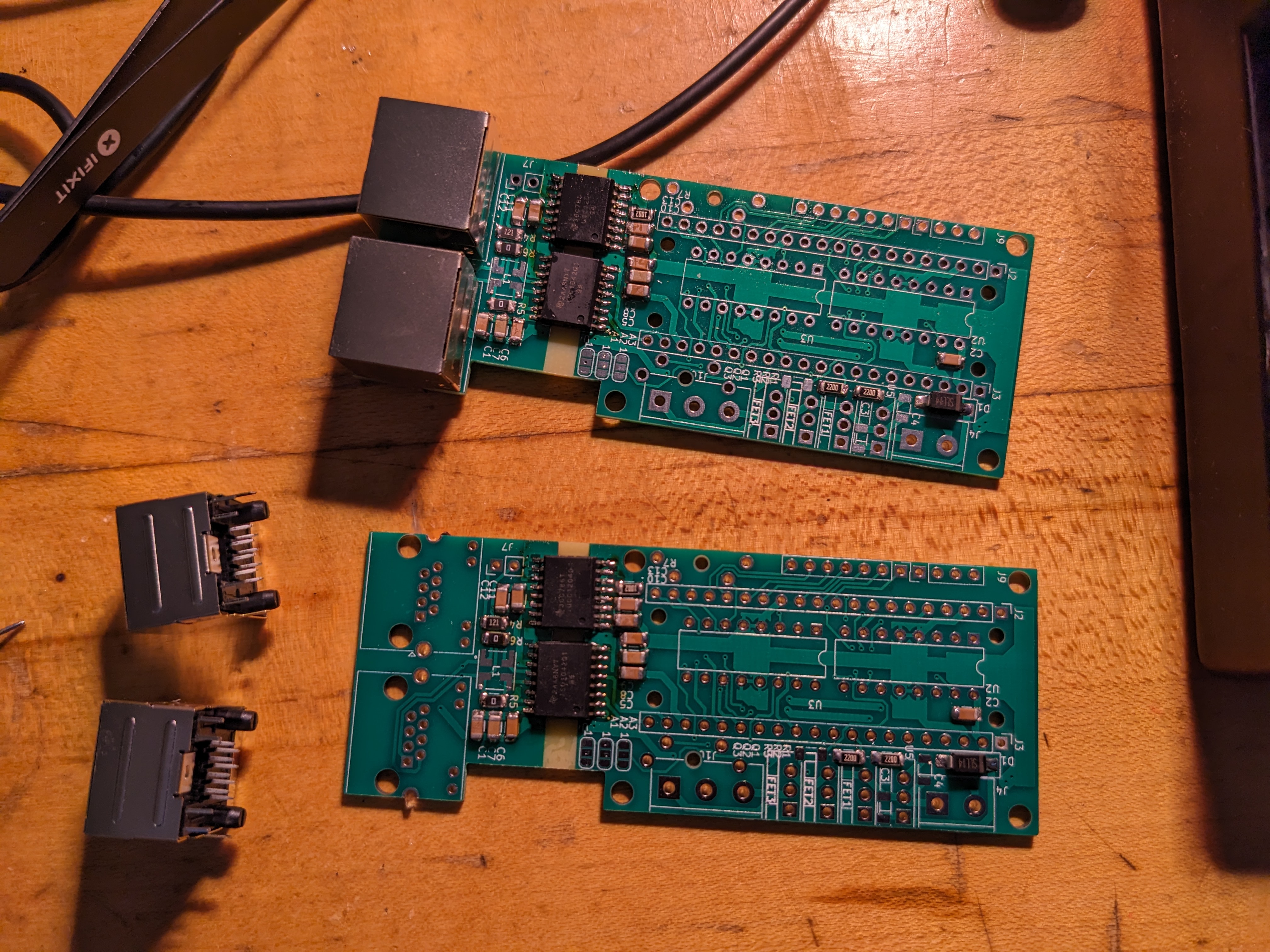
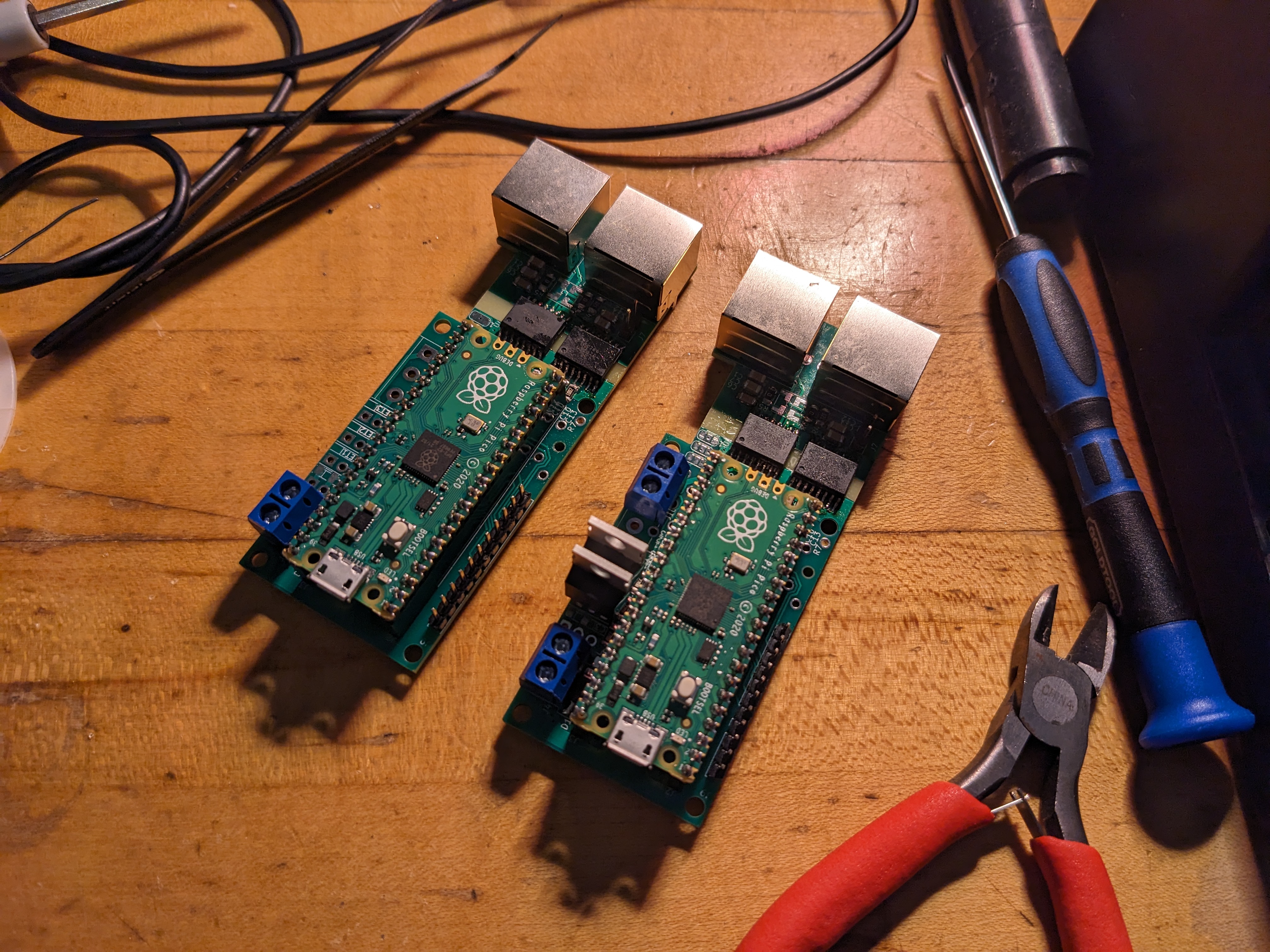
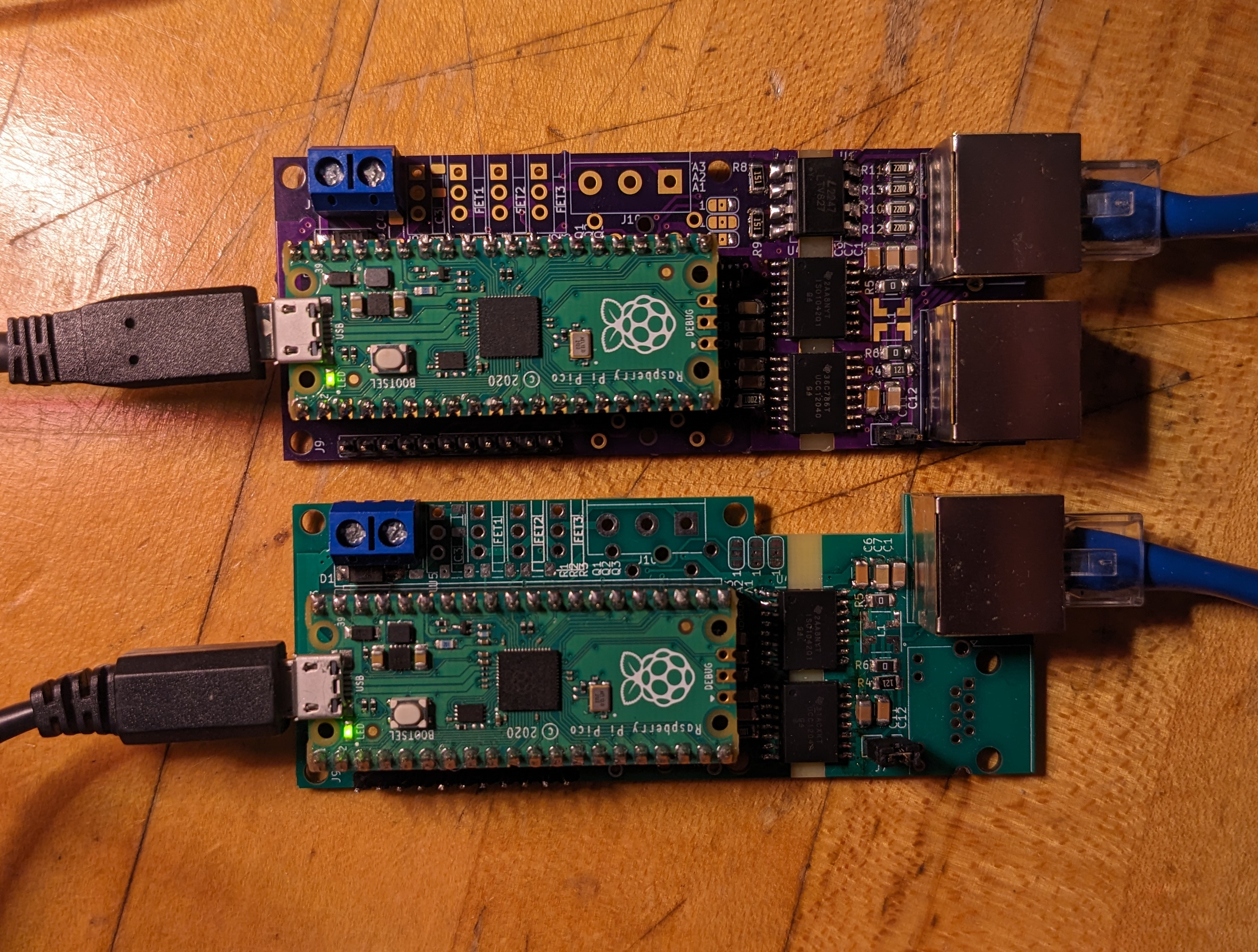
- Never one to underengineer, I decided to link all of the instruments in my controller together with a CAN bus, just like a real modern vehicle (although my research suggests modern trains usually use buses that are not specifically CAN). I have designed, iterated on, and created at least five versions of the hardware and firmware to date of a Raspberry Pi Pico-based CAN transceiver/GPIO board designed as a universal component of my Train Simulator Controller instruments. This versatile little board lets me control stepper motors, solenoids, I2C hardware such as LED and LCD displays, and backlight/illumination and signal LEDs, and can read input from buttons, switches, rotation/position sensors, and just about anything I will need to incorporate. Many photos and blog posts still pending on this particular rabbit hole.
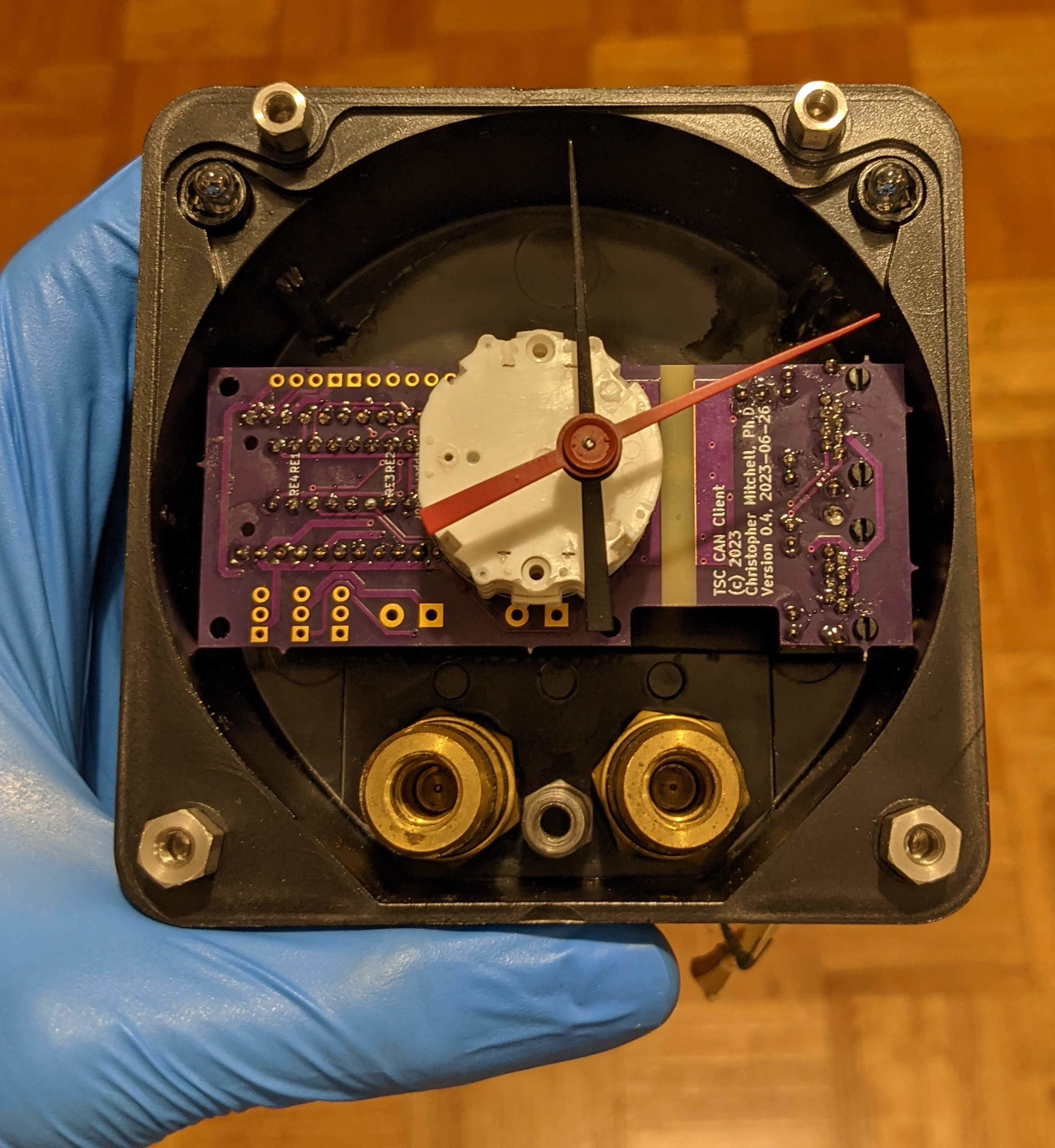
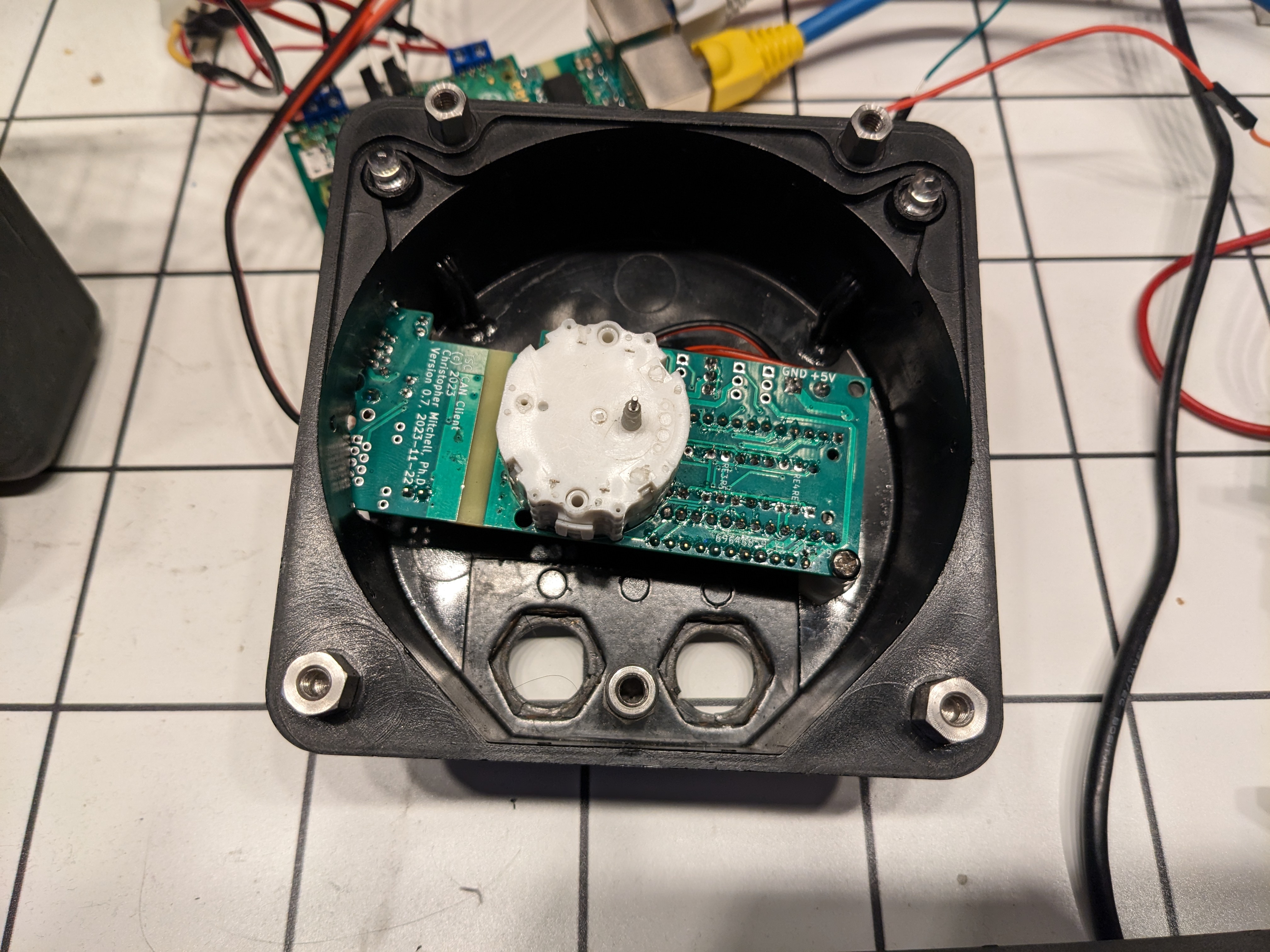
- Gutting (sorry, Jeff) and modifying a real Salem dual-needle locomotive air gauge to work with a coaxial dual stepper motor controlled by my CAN transceiver, as my first prototype CAN-compatible instrument for my dashboard (blog post not yet written - are you seeing the pattern?).
- Extensive research and purchasing of ex-train dashboard parts such as gauges, buttons, and switches, including painstaking Google Image-searching to try to (eventually successfully) determine exactly what makes and models of buttons and other standard industrial controls were used in some of the UK trains that are inspiring this project.
I have been dragging my feet on actually posting about this project on Cemetech (save for this oblique topic about stepper motors), but now that I have finally gotten it started, I intend to post much more frequently about the project, including plenty of visuals that are missing from this introduction. Don't hesitate to post any comments, questions, and suggestions - and if you happen to be a Train Simulator enthusiast, a current or past driver, or especially have good (legal) sources for scrapped or OEM equipment (especially master controllers - anyone have a connection at Faverly?), please let me know!